

忙しいサラリーマンが、休憩中に見れる1分ほどの動画を作りました。
今回は、 『負荷軸追加活用術』です。
動画はこちらから!
さて、負荷軸とはなんでしょうか?
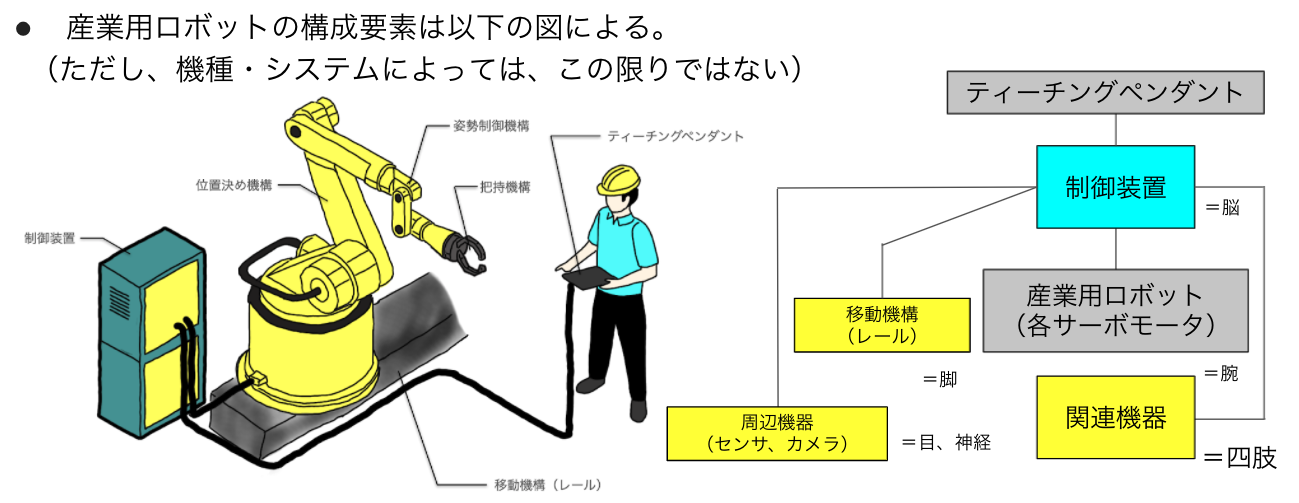
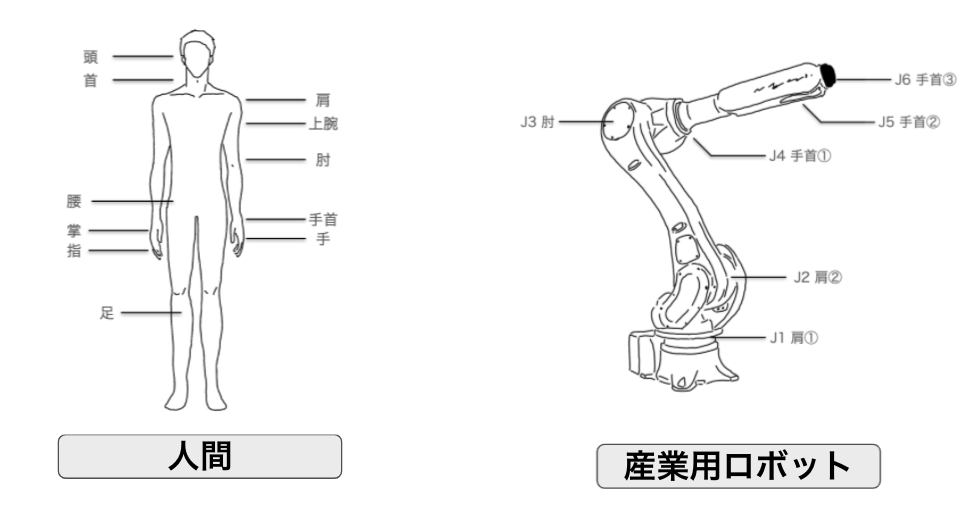
産業用ロボット(垂直多関節ロボット)は人間で言うと腕になります。
なので、動くことができません。
また、例えば、溶接ロボットであれば、『この角度だと溶接しづらいから、もう少しワークの位置を変えたいな。』
そんな時にポジショナーを使えば、ちょうどいい位置にワークの姿勢を変えられます。
ですが、これをPLCでやりとりしていては、システムが複雑になってしまい、溶接ロボットの運用に時間ばかりかかってしまいます。
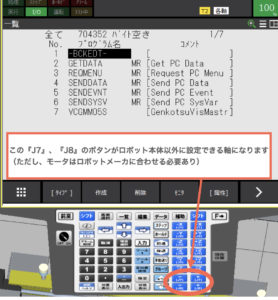
上の図のように、ティーチングペンダントには、ロボット本体だけの場合、使わないボタンがあります
これが追加できる負荷軸です。
このボタンを使い、スライダーの位置やポジショナーの姿勢をロボットのプログラムに覚えさせることによって、
ロボットの動きに同期したスライダーやポジショナーを用いたシステムが出来上がるということです。